Engineers aim to design complex, novel artifacts that perform as well as theory estimates (Kossiakoff et al., 2011). To do so, engineers make a series of choices during the artifact’s design that get them to their goal. Each choice updates and refines the artifact as its real performance is demonstrated against what may (or may not) be possible (Hazelrigg, 1998). Sometimes, a choice also changes the constraints of what engineers are designing towards (Gralla et al., 2016). In short, each choice incrementally solidifies what is and reveals more of what is possible, opening the way for the next one after that (Schon & Wiggins, 1992; Simon, 1973).
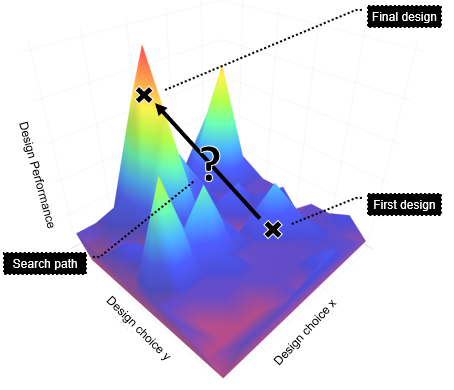
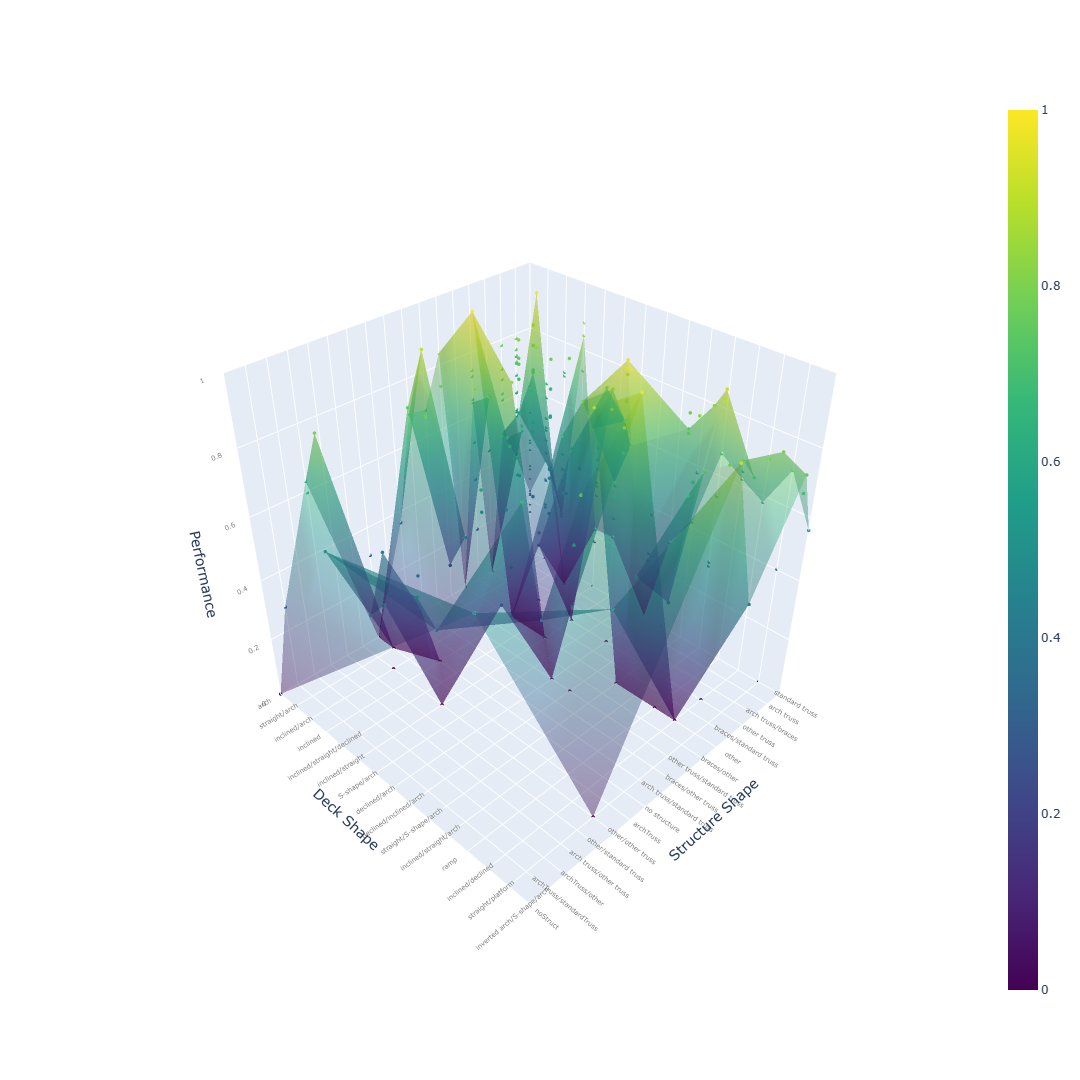
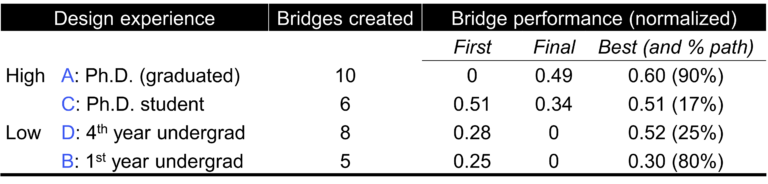
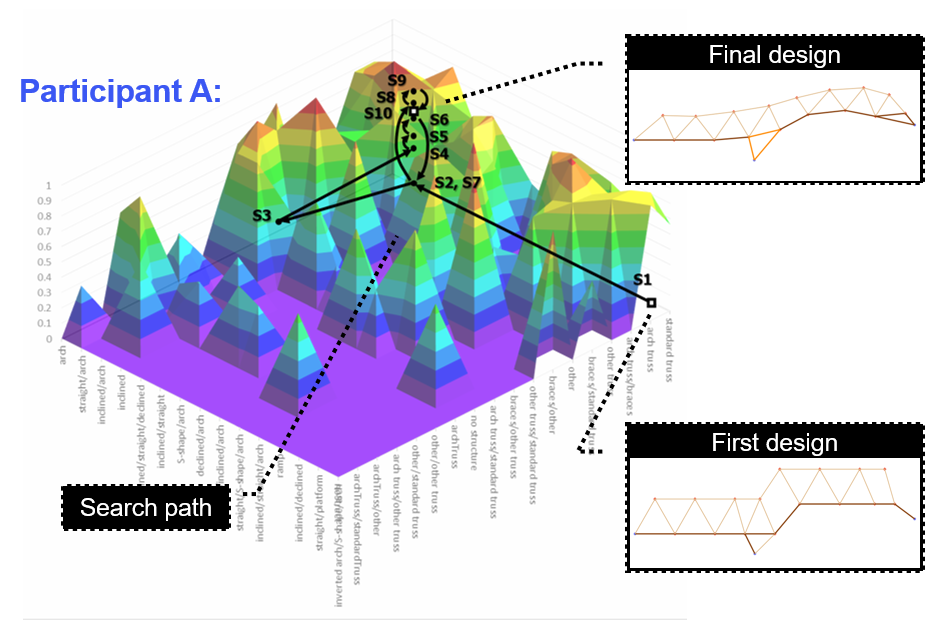
Scholars studying problem-solving have previously abstracted this search process as navigating a rugged solution landscape (Levinthal, 1997; Loch et al., 2003). Specifically, the landscape depicts alternative versions of the same artifact (x,y-plane), varying the design choices and their related performance (z-axis). The progress between the first and final design forms a path on this landscape. Based on work comparing the design behaviors of experts and novices, these paths may differ systematically across engineers with different expertise (e.g., Atman et al., 1999; Cross & Cross, 1998).
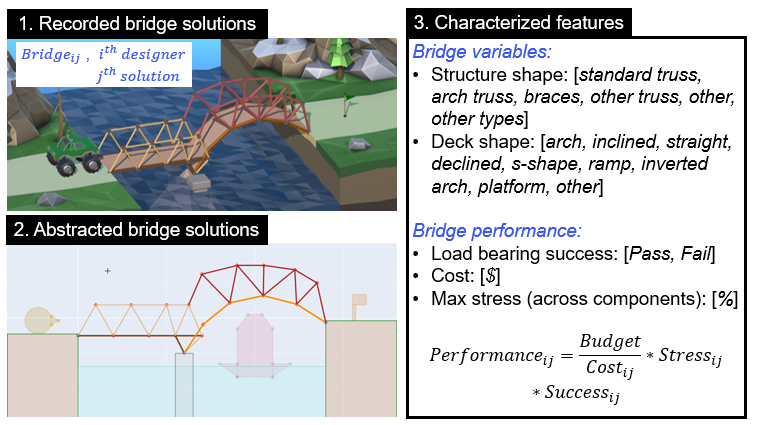
However, while scholars have theorized many design process models (e.g., Wynn & Clarkson, 2018), few of these models consider how artifact performance estimates drive design decisions. Additionally, scholars have used rugged landscapes to empirically represent a set of solutions to a well-defined problem (e.g., Knudsen & Srikanth, 2014), but their usage concerning complex ones is scarce.
To address that gap, we first focus on representing the search process on a rugged solution landscape. In particular:
RQ: How can we visualize complex design as navigating a rugged landscape?